由人工智能(AI)方法操控的水下自主机器人(AUVs),可用于检查、保养、维修水下设施。
编译 | 流沙
为了确保海上基础设施,如风力发电机或油气生产设施的安全,定期检查与维护是必不可少的。然而,在水下进行的工作不仅复杂、昂贵,而且对从事这项工作的潜水员来说也存在相当大的风险。水下遥控机器人(ROV)已经被用于监测海上资产的状况。但如今的发展趋势是这些水下机器人将需要长期停留在海中,成为所谓的水下常驻AUV,还可在水中自主作业,同时在必要时可进行远程控制。
由德国人工智能研究中心(DFKI)领导的联盟在Mare-IT项目中开发出一套整体解决方案,来实现这一愿景:一种创新型双臂AUV,可用于复杂的检查与维修工作,并配备强大的IT基础设施,能够直观地控制与监测该系统,还可与操作员进行有效的信息流交互。“石油圈原创,石油圈公众号:oilsns”
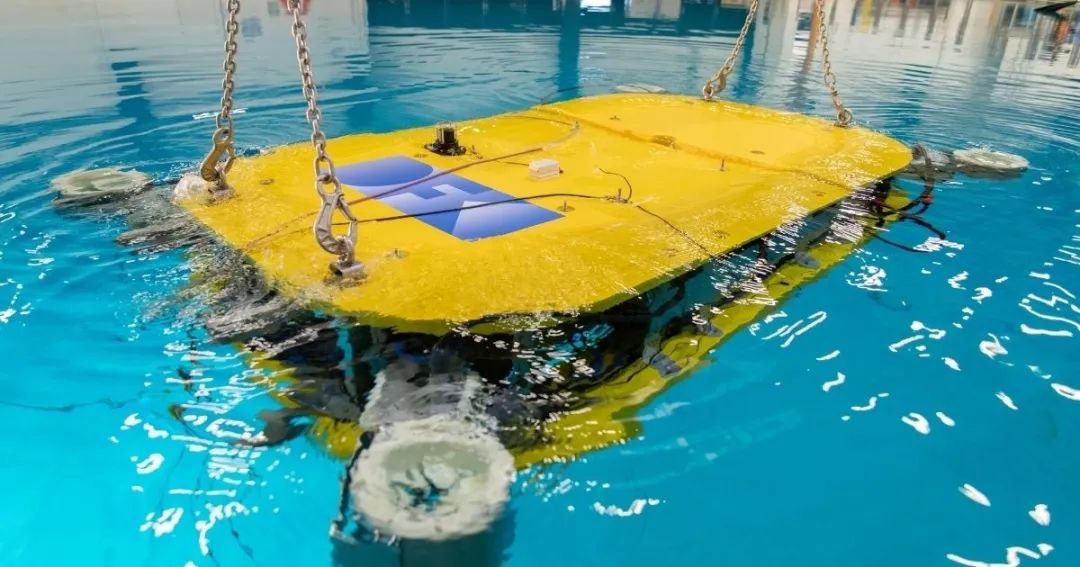
一名研究员在泳池边缘检测AUV在双臂模式下的防撞情况。(图片来源:DFKI的Thomas Frank)
01.自主远程检查与维护的创新型双臂AUV
DFKI机器人技术创新中心在Mare-IT项目中成功设计并制造了Cuttlefish水下自主机器人,这是一种可在水中自由定位的干预型AUV。这款创新型AUV在其腹侧安装了两个深海抓取系统,使其能够操纵水下物体。利用这种特殊设计和基于人工智能的控制,可在下潜过程中改变重心与浮力,并以稳定的方式调整和保持任何方向。除了完全自主运行之外,该机器人还可利用光纤电缆,以混合模式(所谓的监督自主)运行。这种混合模式使人们可在水下结构的关键作业期间,干预与远程控制AUV。
“石油圈原创,石油圈公众号:oilsns”
除了机械臂之外,该系统还配备了许多用于环境感知的传感器,例如声纳传感器、照相机、激光扫描仪与磁力计。为了有效处理大量的传感器数据,研究人员开发出一种特殊的架构概念,可直接在机器人上对数据流进行分散分析。此外,还可配备了一个标准接口,可实现AUV、控制站与内部业务基础设施之间的双向数据交换。

AUV直立于水中,伸出机械臂。(图片来源:DFKI的Thomas Frank)
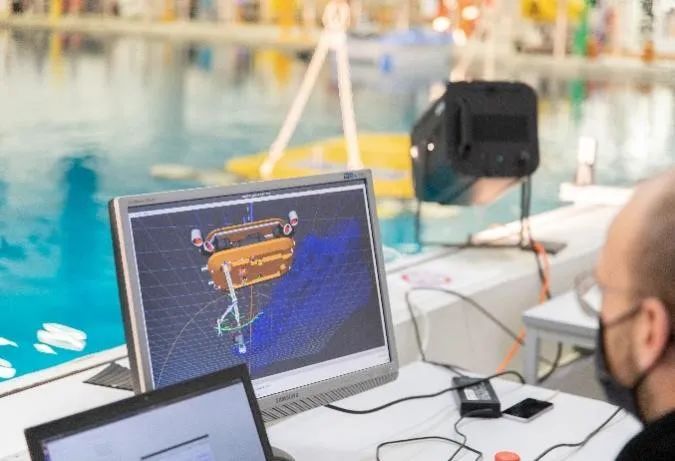
02.直观遥控AUV与人造磁场定位的虚拟副驾驶
DFKI认知辅助系统研究部门开发的虚拟副驾驶,可在遥控任务期间为控制站人员提供支持。它配备了微软HoloLens头显,可与控制站结合使用,也可以作为单独的轻型交互媒介,例如在船上使用。借助显示器上的全息三维显示,操作人员可随时了解AUV与水下结构的状态。利用语音交互功能,能够显示出传感器信息、测量值,以及所设置的警报。可通过语音命令控制AUV的摄像头,结合眼球跟踪技术,检索出人们当前正在观察的基础设施组件的信息。此外,还可以在任务期间,设定自己的语音术语,并将其作为别名使用,例如,用于摄像机或位置对接。“石油圈原创,石油圈公众号:oilsns”
为了扩展创新型交互技术,DFKI嵌入式智能研究部门在Mare-IT项目中开发了一个网络应用程序,可以通过智能手机或平板电脑等移动设备控制AUV并改变其参数设置。此外,研究人员还研究了使用人造振荡磁场来定位水下机器人的可能性。

AUV以直立姿势在水下执行操纵任务。(图片来源:DFKI的Thomas Frank)
03.强大推进器与智能控制实现高效运动
WITTENSTEIN网络电机公司开发、生产了用于驱动AUV的高强度推进器。这种推进器的推力高达500牛顿,具有防海水侵蚀的功能,适用于高达6000米的水深。在制造过程中没有使用液体填料,采用了特殊的灌封技术,以避免对环境造成化学危害。推进器配套的伺服变频器,拥有专门与推进器电机相匹配的无传感器控制,可在整个速度范围内提供准确、高度动态的速度控制,直至旋转的两个方向都处于静止状态。该AUV配备了八个这样的推进器,在网络覆盖范围内,这些推进器能够实现AUV与水下结构对接所需的高精度运动。
“石油圈原创,石油圈公众号:oilsns”
04.塑造整合管理框架增强互通性
在Mare-IT项目中,SAP公司研究了如何以及在何种条件下将自主系统(例如AUV)整合到云系统等IT基础设施中。为此,该公司开发出工业4.0参考架构的核心组成部分–管理框架,实现了数字孪生与商业应用的整合。该管理框架可在任何制造商的解决方案之间搭建互通性。它降低了整合成本与工作量,尤其是当多家公司都要访问数字孪生的数据时。SAP公司为计划内、计划外的维护流程都设计了管理框架原型,例如海底结构的隔离阀。如今,SAP资产管理智能云应用可通过隔离阀的管理框架启动此类维护作业,并可从水下机器人那里接收到执行状态的反馈。得益于管理框架,其他各方的任何系统都可被添加或被其他系统取代,且无需太多整合工作。

该AUV正处于驾驶状态,其机械臂已被折叠收回。(图片来源:DFKI的Thomas Frank)
05.水下结构无损检测技术
ROSEN公司是全球领先的能源行业大型结构完整性管理解决方案供应商,在该项目中为AUV开发出四种不同的测量技术,用于检查各种海底结构的状况。这些技术分别是:检测铁磁结构的磁场传感器、测量阴极保护系统电场的传感器,以及利用AUV机械臂来测量局部壁厚的超声波与涡流传感器。此外,还开发出一种通信浮标,以确保机器人可通过水柱将数据传输至中央控制站。”石油圈原创,石油公众号:oilsns
未经允许,不得转载本站任何文章:
