MPD and continuous circulation technology overcome deepwater challenges
Mud gas separator
Drilling mud returns and any entrained gas from the manifold enters the mud gas separator (MGS), where gas is separated out and the gas flowrate is metered using a laser particulate meter. The MGS is fitted with a centrifugal mud pump that can be used when drilling returns fall below 300 gpm to prevent drilled solids from settling in the MGS cone or return flow line.
KICK/LOSS DETECTION
The MPD drilling program used a standard MPD kick and loss event detection system. MFI derived data from stroke counters and MFO data derived from Coriolis flow meters are processed through an applied moving average SCADA data filter.
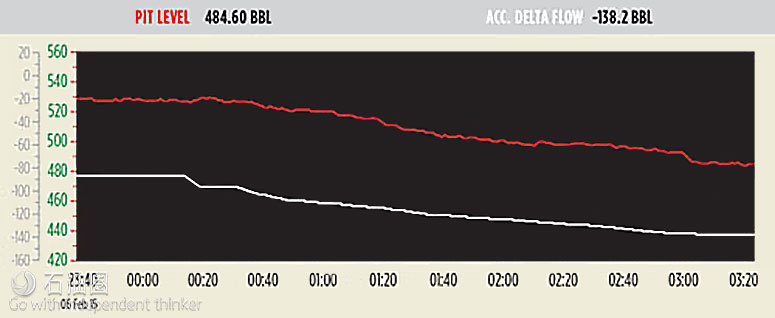
Proportional changes between the two flow readings are detected by the accumulative delta flow trend. The accumulative delta flow trend is the difference between MFI and MFO over time; instantaneous flow difference is the difference between MFI and MFO at a given time. A kick alarm is triggered when a positive change in the slope of the accumulative delta flow curve occurs with a formation fluid influx rate that exceeds defined section tolerance limits, Fig. 2.
Dynamic MPD well control response
The response to an influx is an increase in MPD ASBP to a predetermined pressure sufficient to reduce the influx volume. ASBP is increased until MFO equals MFI. The total kick volume taken is determined from the system once this flow equalization is achieved.
UPFRONT MPD ENGINEERING
An initial MPD feasibility and concept study was used to plan drilling in the narrow PP/FG margin formations. One of the key results was using a lower-than-standard mud weight to widen the operational drilling window while remaining dynamically overbalanced during MPD operations.
The study examined how to compensate for ECD loss when not circulating or during drill pipe connections using MPD ASBP. In these circumstances, conventional MPD systems with a backpressure pump are significantly limited in accurately maintaining BHP; with mud pumps off, only a single pressure point at a specific depth in the open hole section can be controlled by varying ASBP. This pressure control point is normally established at TD to prevent influx.
As a result, pressure at the weak zone is greater than when circulating and can exceed the fracture gradient, causing losses higher up in the open hole section. Alternatively, to prevent fracturing, this pressure control point can be at the weak zone. But this results in BHP at the bit being less than the circulating BHP EMW. If this pressure falls below the pore pressure, it can cause a wellbore fluid influx [kick].
This limitation was mitigated using CCS to maintain constant BHP and ECD along the entire open hole section during drill string connections. Using CCS also eliminated pressure surges when starting and stopping circulation, further enhancing BHP control. The study concluded that combining the CSS with the deepwater MPD system would enable maintenance of a truly constant wellbore pressure profile while drilling and making connections.
FEED optimization
A detailed front-end engineering design (FEED) was executed, including MPD and CCS operational procedures, MPD well control procedures, bridging documentation, project drawings, and project steering documentation. After completion of a HAZID study and prior to the design being locked in, a detailed HAZOP study was conducted to comprehensively and systematically identify all the hazards and operability problems of the MPD project.
Hydraulics modeling
Hydraulics modeling was performed prior to drilling each well. The study considered drilling margins between pore pressure and fracture gradient, maximum allowable standpipe pressure, maximum allowable ASBP, targeted BHP, and hole cleaning requirements.
Mud weight, pump rate, and ASBP for each MPD hole section was determined by steady state simulations performed at the shoe and total depth. These measurements were used to ensure BHP and ECD remained within the drilling window during MPD drilling and connections. Mud weights were statically underbalanced /dynamically MPD overbalanced, or slightly statically overbalanced based on the pressure window prognoses and level of uncertainty.
Steady state MPD simulations were also used to determine the ASBP for a number of MPD operations, including dynamic MPD FIT and LOT, mitigating influxes, and determining the effects of drillstring rotation and rate of penetration on ECD.
Well control simulations
An MPD well control matrix was prepared detailing well control actions to be taken by the MPD operator and driller once an influx was detected and confirmed, Table 1.
The criteria for selecting dynamic MPD or conventional well control is the section influx tolerance (SIT) determined by the amount of gas kick in barrels that can be circulated out of the well using the MPD system and riser without fracturing the formation or exceeding MPD surface equipment pressure rating limits. Conventional well control is used if the influx volume exceeds the SIT.
Simulations used a dynamic kick control hydraulics model to safely circulate influxes of various sizes out of the wellbore. Because the MPD system can accurately detect a formation fluid influx of 2 bbl or less, the influx volumes considered in the analysis were limited to 15 bbl.
A transient drilling simulator hydraulics model allowed modeling of extended back reaming, stripping, and well displacement operations. A MPD ASBP backpressure schedule compensated for the loss of circulating pressures as the drillstring was pulled out of hole from TD up to the 30° hole inclination angle in the 9 5/8-in. casing. The objective was to maintain constant BHP at a control point in the open hole and ensure that the well was taking the correct mud displacement during tripping operations.